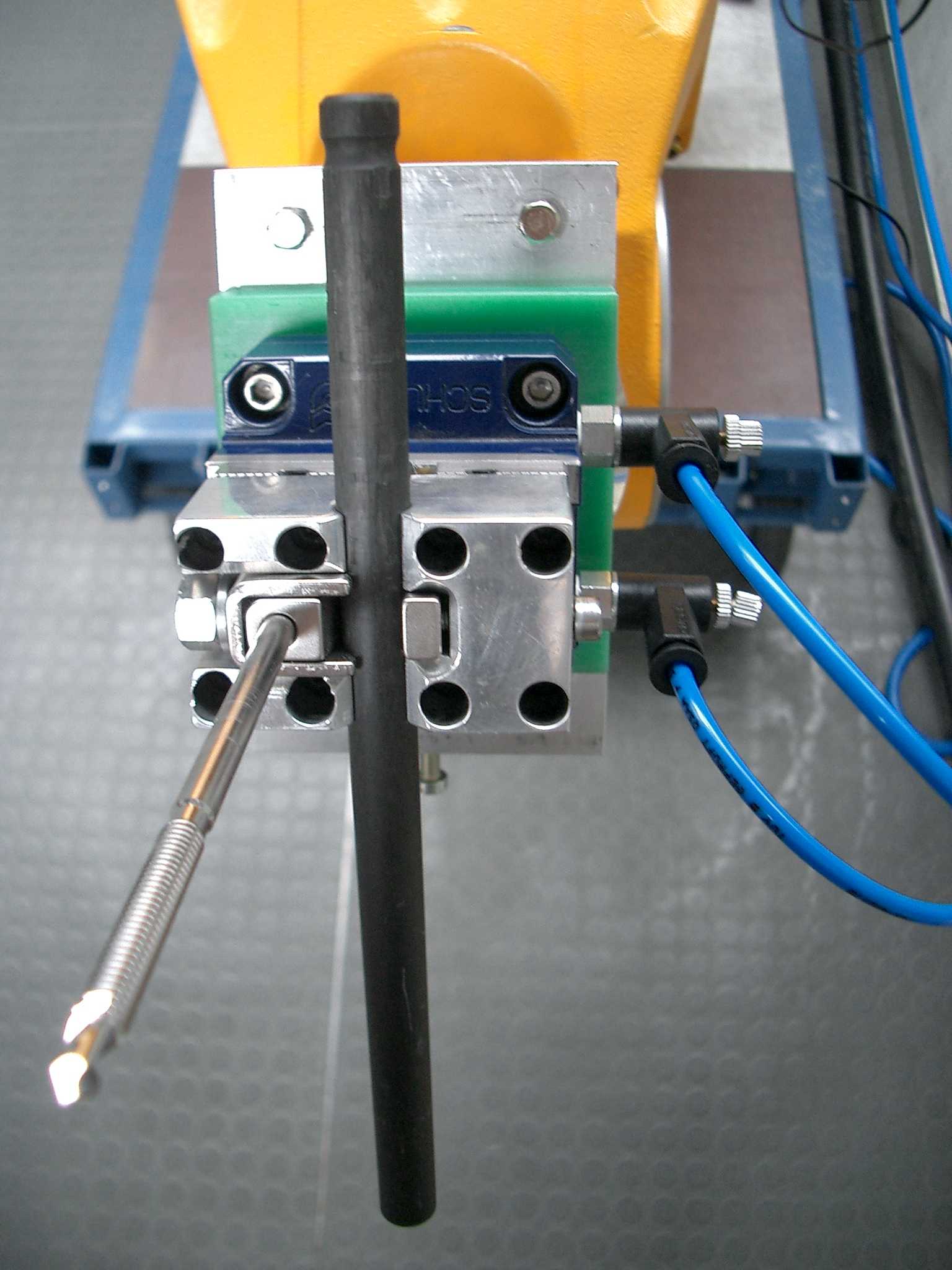
Medical robotics research included one of the first trials involving robots in accident surgery. The DFG-funded project REPOROBO (Repositioning Robot) demonstrated the ability of an industrial robot for the repositioning of a bone following fracture. This demonstration employed an impactive robot gripper capable of prehending the fixture without the danger of slippage. The robot was capable of applying forces of up to 300N and could hold the position steady over many hours. Furthermore, should the patient move, data from a 3D inclination sensor could be used to allow the robot to follow the movements which maintaining prehension.